Item No:71103
ロボクラフトシリーズ No.3
メカ・ビートル (障害物回避タイプ)
MECHANICAL BEETLE (OBSTACLE EVADING TYPE)
1,408円(本体価格1,280円)
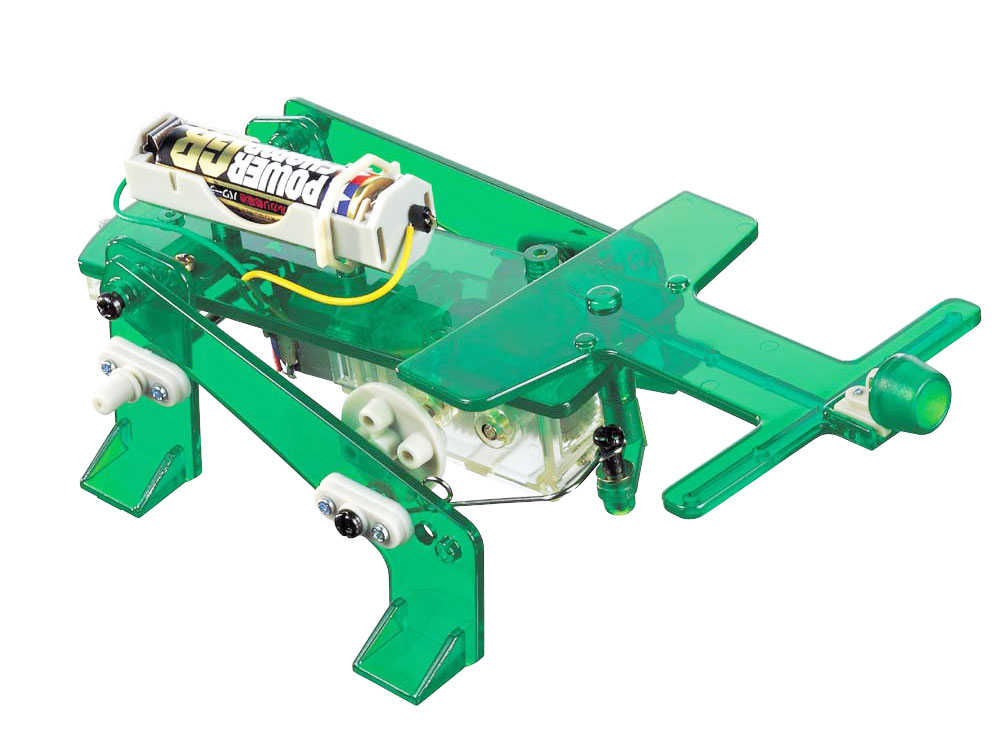

【 大きな角を使って障害物をよけながら進みます 】
大きな角を左右にふって障害物をキャッチ。障害物にぶつかると角を使ってよけながら4足歩行で進むカブトムシ型のロボットです。ギヤボックスをのせるベースや4本の足、角はクリヤーグリーンの樹脂パーツ。逆転スイッチやギヤケースもクリヤーパーツとしてメカニカルムードたっぷりの仕上がりです。組み立てはビス止めとはめ込み、そして配線はゴムパイプを使った簡単な作業で完成。動きの仕組みをじっくり観察してください。
【 基本スペック 】
●全長=195mm ●重量=110g(電池を除く) ●ボディ材質=ABS樹脂製 ●ギヤボックスの組みかえで2種類の走行スピードが選べます。 ●ギヤボックス、モーター、逆転スイッチ付き ●組み立て用ドライバー付き ●単3電池1本使用(別売) ●走行時間:アルカリ乾電池使用で、低速約3時間、高速約2時間
【 遊び方 】
平面での歩行が最適です。また四方に壁をつくれば、その中で動き回るユーモラスな姿を観察できます。
⇒組立説明図を見る(PDF)
大きな角を左右にふって障害物をキャッチ。障害物にぶつかると角を使ってよけながら4足歩行で進むカブトムシ型のロボットです。ギヤボックスをのせるベースや4本の足、角はクリヤーグリーンの樹脂パーツ。逆転スイッチやギヤケースもクリヤーパーツとしてメカニカルムードたっぷりの仕上がりです。組み立てはビス止めとはめ込み、そして配線はゴムパイプを使った簡単な作業で完成。動きの仕組みをじっくり観察してください。
【 基本スペック 】
●全長=195mm ●重量=110g(電池を除く) ●ボディ材質=ABS樹脂製 ●ギヤボックスの組みかえで2種類の走行スピードが選べます。 ●ギヤボックス、モーター、逆転スイッチ付き ●組み立て用ドライバー付き ●単3電池1本使用(別売) ●走行時間:アルカリ乾電池使用で、低速約3時間、高速約2時間
【 遊び方 】
平面での歩行が最適です。また四方に壁をつくれば、その中で動き回るユーモラスな姿を観察できます。
⇒組立説明図を見る(PDF)
-
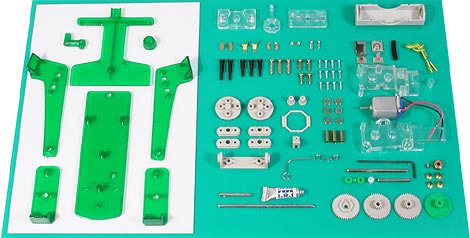 必要なパーツをすべてセット
必要なパーツをすべてセット
組み立てはビス止めとはめ込み、配線はゴムパイプを使った簡単な作業でOK。手軽にとりくめます。
-
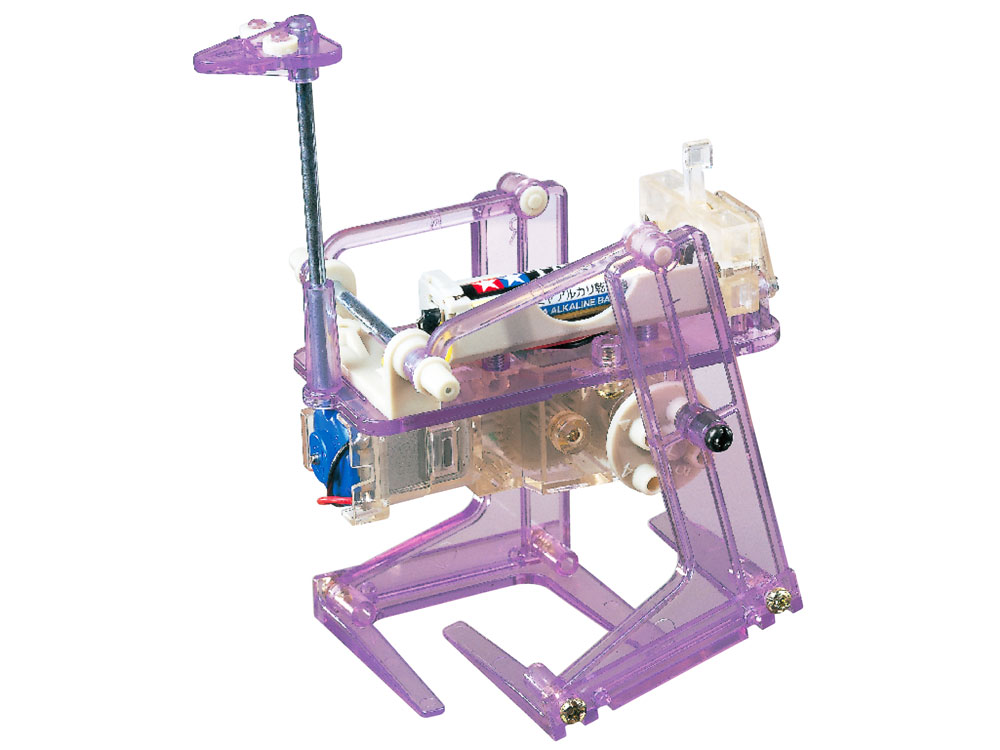
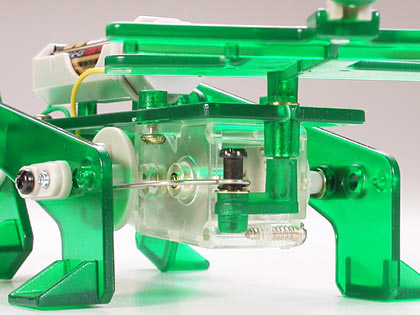 左右に動く大きな角がポイント
左右に動く大きな角がポイント
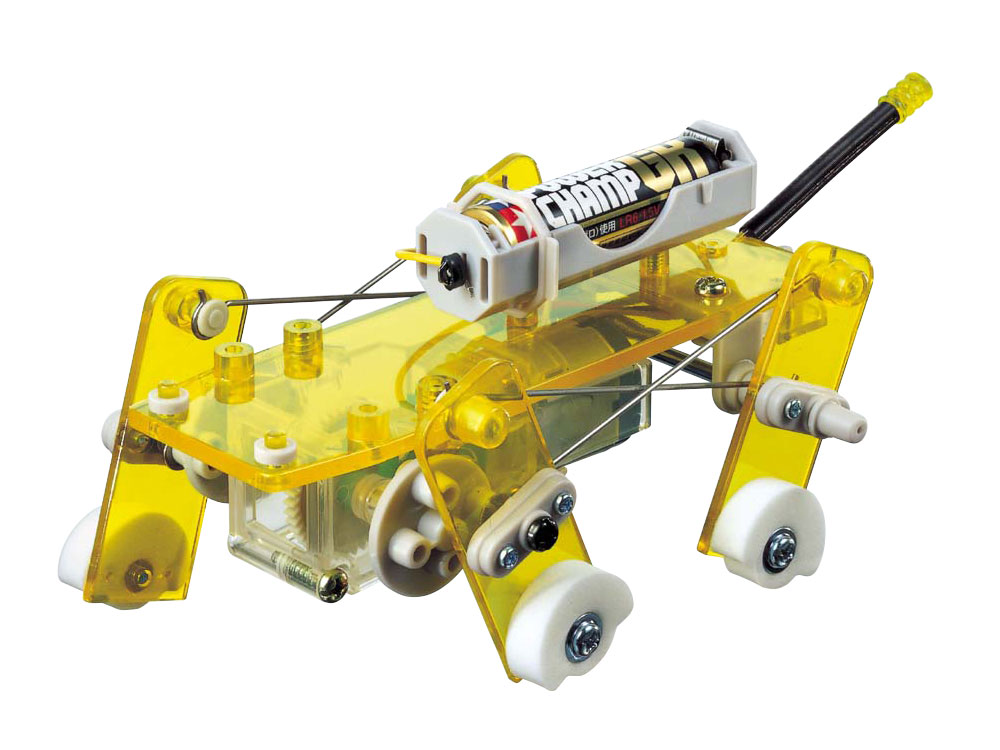
右前足から伸びたリンクロッドで角が左右に動き、障害物にあたると進む方向を変える働きをします。障害物が正面になった時に回避しやすくするために、角の動きは左右非対称となっています。
-
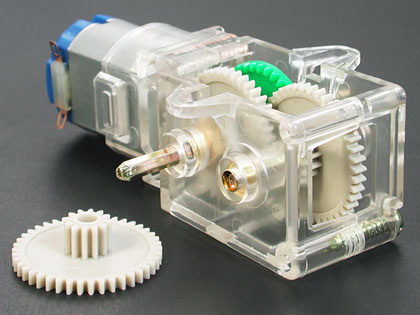 低速、高速の2種のギヤ比を選択可能
低速、高速の2種のギヤ比を選択可能
好みによりギヤを追加することで2種類の歩行速度が選択可能。また逆転スイッチにより後進も可能です。
-
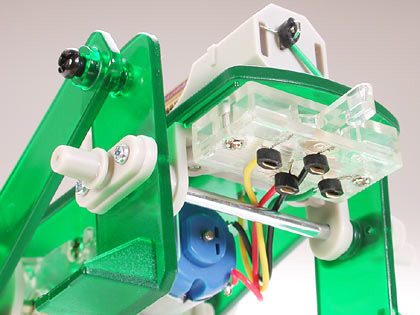 クリヤータイプのスイッチ
クリヤータイプのスイッチ
スイッチもクリヤータイプでメカニカルな雰囲気たっぷりです。




SHOPPING 商品のご購入