
BBC マイクロビットのプログラムについて
71202 マイコンロボット工作セット(ホイールタイプ)
出荷時のプログラム「障害物をよけて自動走行する」に戻すには
準備するもの
●インターネットに接続したパソコン(Win/Macなど)●マイクロUSBケーブル(別売) ●71202 マイコンロボット工作セット(ホイールタイプ)
※タブレット端末やスマートフォンでは正常に作業できない場合があります。
-
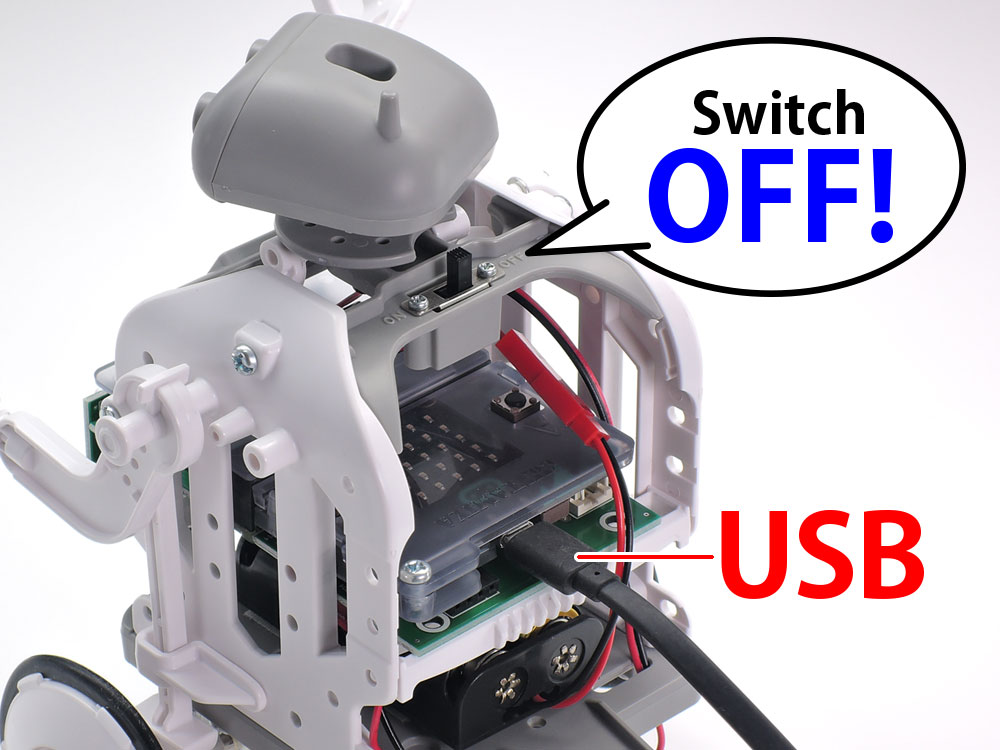
【1】パソコンと「BBC マイクロビット」を接続します。
ロボット本体のスイッチを切り、マイクロUSBケーブルを使ってパソコンと「BBC マイクロビット」を接続します。 パソコンはインターネットに接続している必要があります。
-
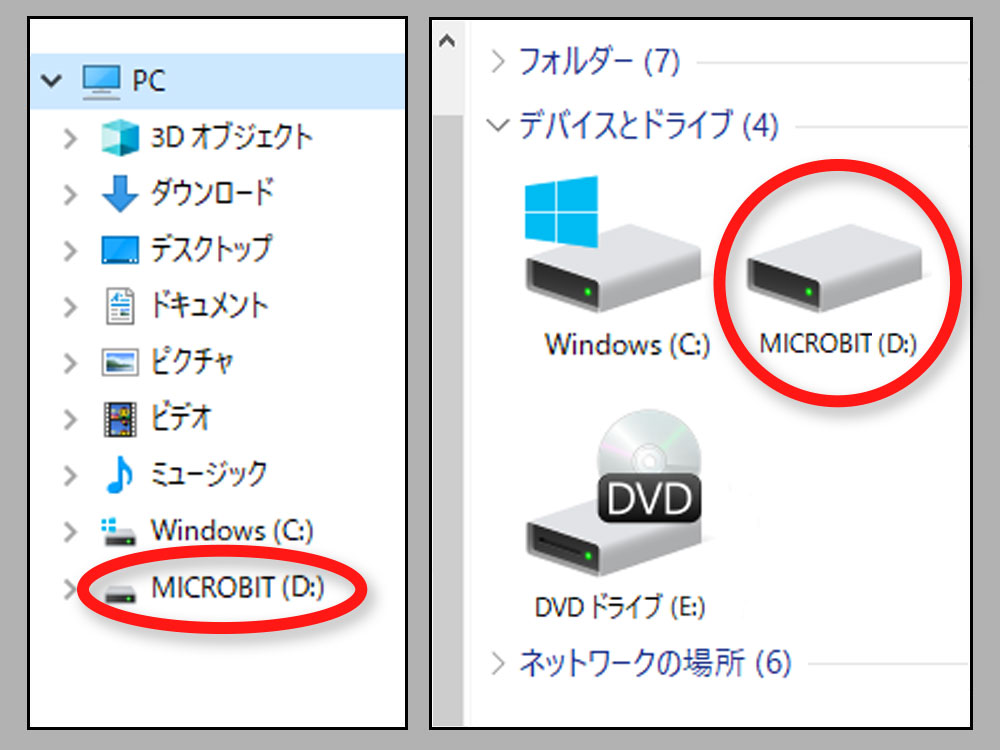
【2】正常に接続した場合、パソコン画面上で「MICROBIT」と表示されます。
パソコンのデスクトップやエクスプローラーなどには「MICROBIT」という名前のドライブとして表示されます。正常に接続できない場合、原因の多くはマイクロUSBケーブルにあります。その場合は別のマイクロUSBケーブルをお試しください。
-
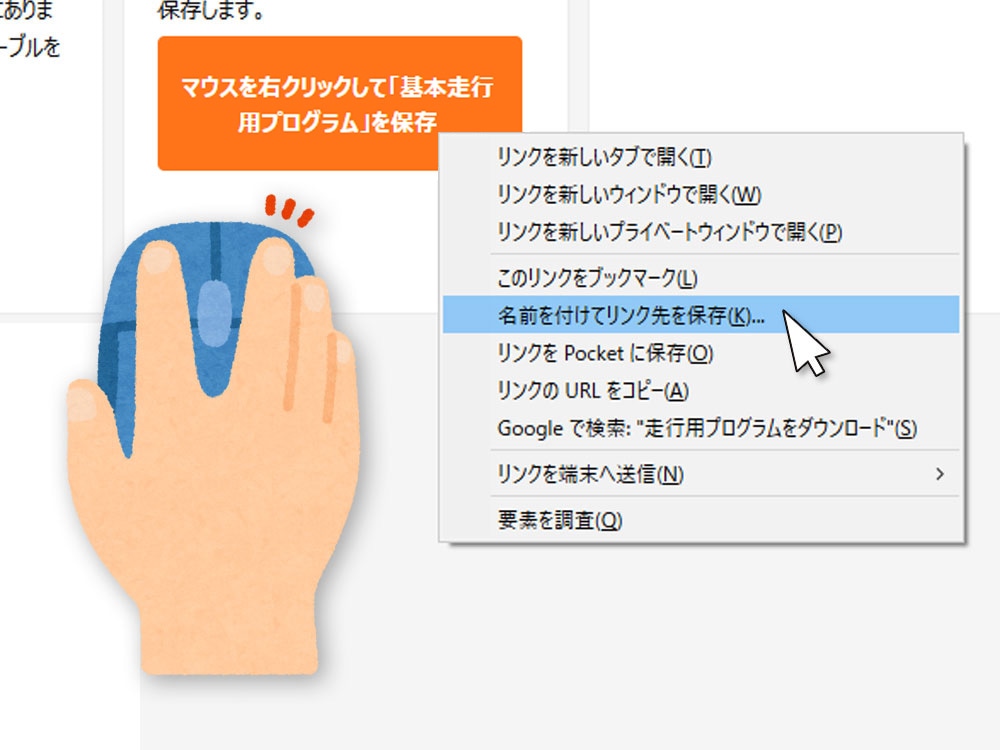
【3】「走行用プログラム」をパソコンへダウンロードして保存します。
下のリンクから走行用プログラムをダウンロードします。マウスを右クリック(Windows:名前を付けてリンク先を保存、Mac:別名でリンク先を保存)して、デスクトップなどに保存します。
-

【4】プログラムが正常に保存されているか確認します。
正常にダウンロードが終了した場合、パソコンに「06_DrivingProgram_WHEEL_v2.hex」というファイルが保存されています。


-

【5】保存したファイルを「BBC マイクロビット」にコピーします。
ダウンロードして保存したファイル「06_DrivingProgram_WHEEL_v2.hex」を「MICROBIT」にドラッグ&ドロップしてコピーします。これで出荷時のプログラムに戻りました。
-
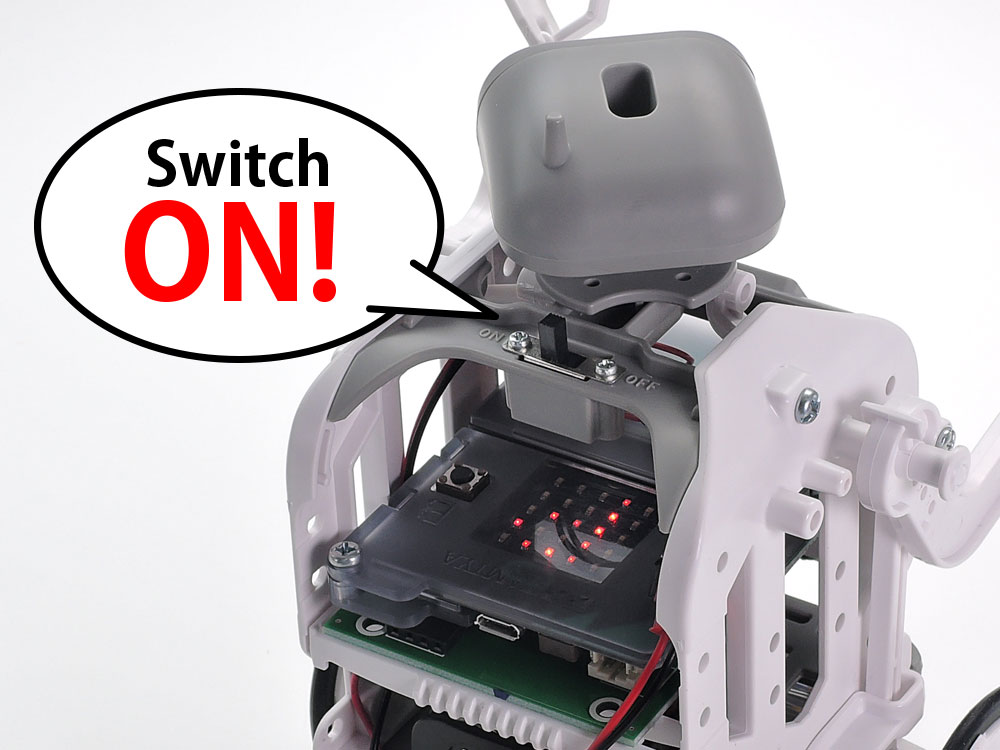
【6】ロボットの動作を確認します。
マイクロUSBケーブルを外し、ロボット本体のスイッチを入れて動作を確認します。マイコンロボット工作セットの組立説明図 12ページ「走らせてみよう!」の動きができればOKです。
ロボットの無線操縦を楽しむには
はじめに
無線操縦を行うにはロボットに搭載のものとは別に、操縦用として「BBC マイクロビット」がもう1個必要です。タミヤ カスタマーサービスにご注文ください。すでに「BBC マイクロビット」をお持ちの方は下のバナーからコントローラー用プログラム(02_ControllerProgram_v2.hex)を保存してご自分の「BBC マイクロビット」にコピーしてください。コントローラーの組み立て方法や必要なものは製品の組立説明図の13ページをご参照ください。
【コントローラーの組み立てに必要な部品】
無線操縦用の「BBC マイクロビット」はタミヤ カスタマーサービスから購入できます。タミヤ カスタマーサービスが用意する「BBC マイクロビット」にはコントローラー用プログラム(02_ControllerProgram_v1.hex)がインストール済み。電池ボックスなどの部品もあわせて購入すれば、手軽に無線操縦に挑戦できます。
●コントローラー用BBCマイクロビット(プログラムインストール済み)(部品番号:19803217)
●M部品(部品番号:19117069)
●電池ボックス(部品番号:17257012)
・単3形電池2本と市販の両面テープが別途必要です。
・コントローラー用電源スイッチはマイコンロボット工作セット ホイールタイプ(71202)に同梱されています。
【お問い合わせと購入について】
タミヤ カスタマーサービスにご連絡ください。ご注文の際は部品番号もお知らせください。https://www.tamiya.com/japan/customer/index.html

プログラム集(ダウンロードしてお使いください)
マウスを右クリック(Windows:名前を付けてリンク先を保存、Mac:別名でリンク先を保存)
★お願い★
ご自身でプログラムの変更・書き換えをされた場合(弊社が提供するサンプルプログラムへの変更も含む)に発生する不具合や事故については保証対象外とさせていただきます。 また、弊社が提供するサンプルプログラムに関する質問はお受けできますが、プログラムの組み方に関するご質問にはお答えできませんので、弊社が提供するQ&Aをご覧いただくか、BBCマイクロビットの リファレンスをご覧ください。
なお、BBCマイクロビットが提供しているMakeCodeの仕組みや内容については弊社では回答できません。
※BBC micro:bitは、micro:bit教育財団の登録商標です。
製品にインストールされているプログラム。初期状態に戻す場合などに使用します。
06_DrivingProgram_WHEEL_v2.hex
★No.02「コントローラー用プログラム」(基本)
マイコンロボット工作セットコントローラー用・BBCマイクロビットにインストール(ITEM 19803217)されているプログラム。初期状態に戻す場合などに使用します。
02_ControllerProgram_v2.hex
★No.03「シンプルな走行用プログラム」(応用/サンプルプログラム)
オリジナルプログラムのベースとして活用できます。2秒前進と1秒左旋回を繰り返します。
03_RunningProgram_v2.hex
★No.04「シンプルな超音波センサー用プログラム」(応用/サンプルプログラム)
オリジナルプログラムのベースとして活用できます。障害物までの距離(20~500mm)に比例して鳴らす音の高さを変えます。
04_UltrasonicProgram_v2.hex
★No.05「シンプルな無線操縦用プログラム」(応用/サンプルプログラム)
オリジナルプログラムのベースとして活用できます。
コントローラーのAボタン → 2秒前進
コントローラーのBボタン → 2秒後退
コントローラーの傾き → 傾けた方向に1秒旋回
05_RadioControlProgram_v2.hex
Q&A(別ページに移動します)
はじめに
このQ&Aは主にマイコンロボット工作セットのプログラミングを行うために必要な情報をまとめたものです。パソコン上でビジュアルプログラミングソフト「MakeCode」を使ってのプログラミングを前提に説明しています。BBC マイクロビットやMakeCodeの基本的な使用方法をご理解した上で参照してください。WEB上にある無料のソフト「MakeCode」内の「チュートリアル」を使えば、プログラムをより理解できます。
Q&Aページはこちら
※上記をクリックするとQ&Aに移動します。
2019/11/25 更新





