Item No:71124
ロボクラフトシリーズ No.24
メカ・マンモス(首ふり歩行タイプ)
MECHANICAL MAMMOTH (BOBBING-HEAD TYPE)1,738円(本体価格1,580円)
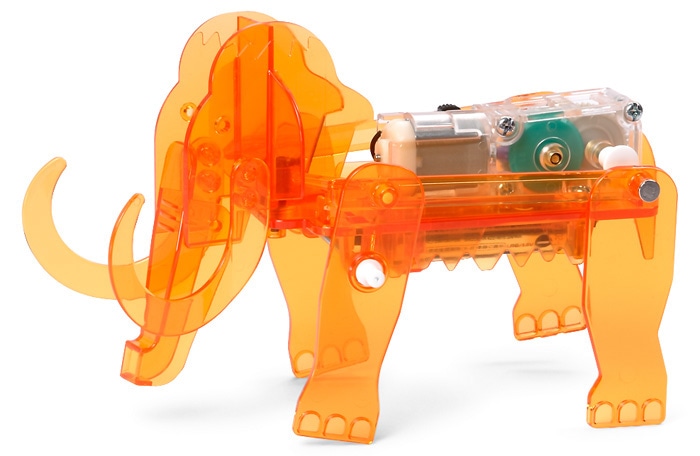
全高=165mm ※写真はキットを組み立てたものです。

【 首をふりながらのっしのっしと歩く 】 足の動きに合わせて巨大な牙を持つ首を左右にふりながらのっしのっしと歩くマンモス型のロボットです。モーターの回転をギヤボックスで減速してクランクアームを使って後足を動かし、後足と一体になったリンクロッドが前足に動きを伝えます。クリヤーオレンジの頭や足、透明パーツのギヤボックスなど必要な部品をすべてセット。はめ込みとビス止めで組立てられ、配線もゴムパイプを使って手軽に完成します。
【 別にお求めいただくもの 】 単3形電池1本
⇒組立説明図を見る(PDF)
【 別にお求めいただくもの 】 単3形電池1本
⇒組立説明図を見る(PDF)
★メカ・マンモス(首ふり歩行タイプ)の動きを動画でチェック!(YouTube)